Education
Momentum equation in a 3D particle and its surface & body forces
Deriving the momentum equation for a 3D particle and the forces acting on the surfaces & body.
by Dasa
01 Sep 2023 | 9 min read
Newton’s second law states that “the changes in momentum in a fluid particle is equal to
the sum of all the forces acting on it.”
⎩⎨⎧The Rate Of Increase of momentum of fluid particle⎭⎬⎫=⎩⎨⎧Sum of forces acting on the fluid particle⎭⎬⎫
Changes in momentum in the x, y, and z directions are given below.
ρDtDu, ρDtDv, ρDtDw
Refer Law of Conservation of Momentum and Energy for details.
The forces acting on a fluid particle are
Surface forces
Pressure forces - normal stress on the surfaces
Viscous forces - normal and parallel to the surfaces.
Body forces
Gravity forces
Centrifugal forces
Coriolis forces
Electromagnetic forces
In the momentum equation, surface forces were added as a separate term, and body forces
were treated as source terms.
The below image shows the Viscous forces acting on the 3D fluid element surfaces.
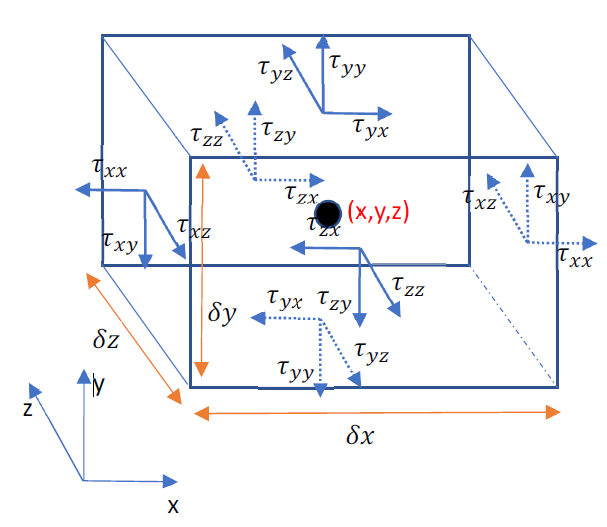
τxx, τyy, and τzz are normal stresses; all other terms are shear stresses. For example,
τxy denotes the Viscous force acting in the direction of y on a plane normal to x.
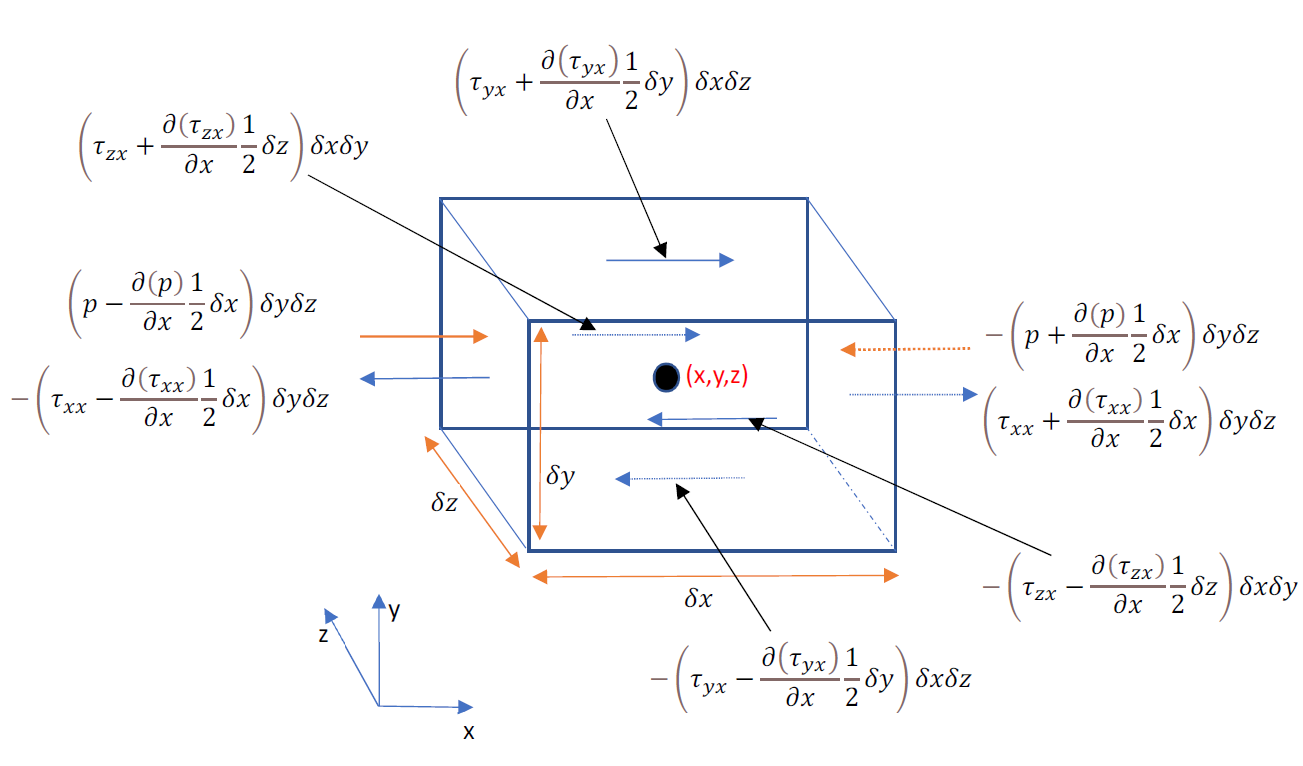
The image below shows the Pressure and Viscous forces acting in the x-direction.
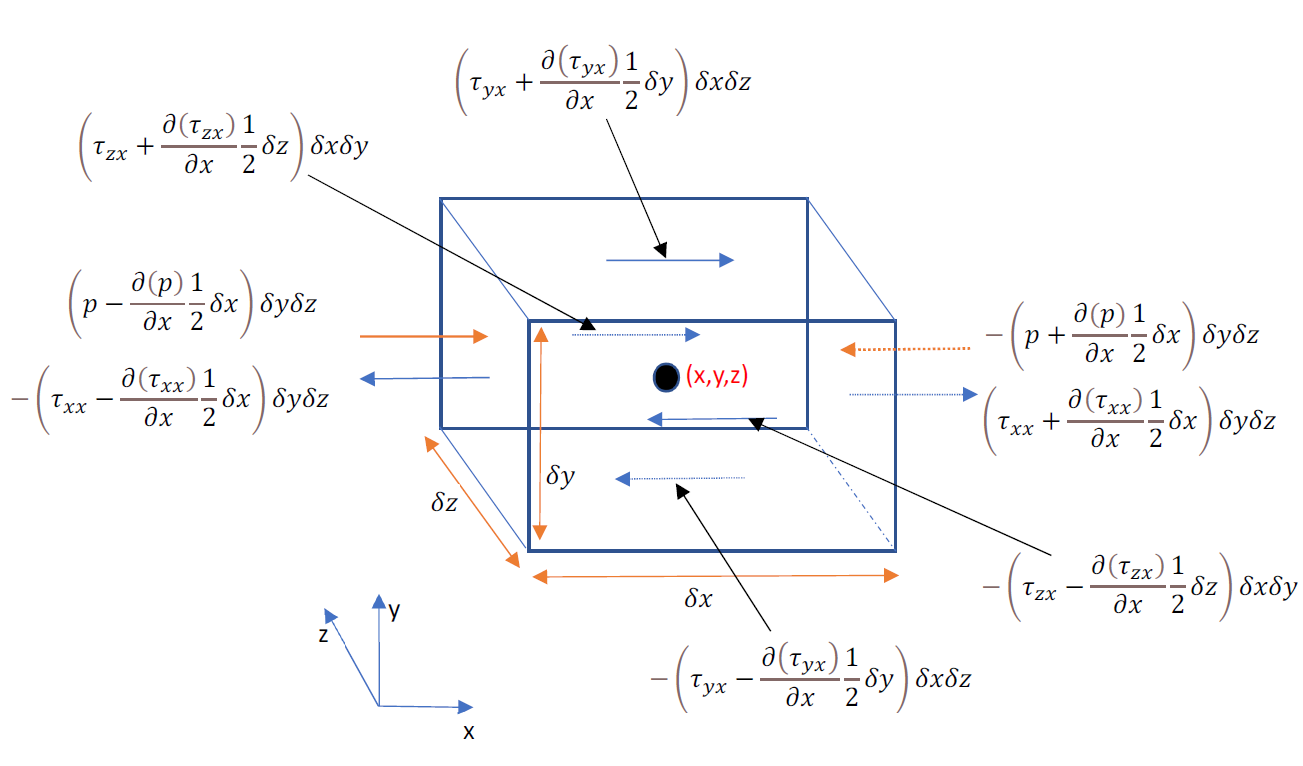
The negative sign indicates the opposite of the direction of co-ordinates. The stresses are force per unit area, and the unit can be N/m². In the above equation, “p” is a compressive stress, and “τxx” is a tensile stress.
The equation for x-momentum with surface forces can be expressed in the following manner.
ρDtDu=(p−∂x∂(p)21∂x)∂y∂z−(p+∂x∂(p)21∂x)∂y∂z−(τxx−∂x∂(τxx)21∂x)∂y∂z+(τxx+∂x∂(τxx)21∂x)∂y∂z−(τyx−∂y∂(τyx)21∂y)∂x∂z+(τyx+∂y∂(τyx)21∂y)∂x∂z−(τzx−∂z∂(τzx)21∂z)∂x∂y+(τzx+∂z∂(τzx)21∂z)∂x∂y=−[(∂x∂(p)∂x)∂y∂z]+(∂x∂(τxx)∂x)∂y∂z+(∂y∂(τyx)∂y)∂x∂z+(∂z∂(τzx)∂z)∂x∂y
Divide all the terms by ∂x∂y∂z (unit volume) gives the momentum forces per unit volume.
ρDtDu=−(∂x∂(p))+(∂x∂(τxx))+(∂y∂(τyx))+(∂z∂(τzx))=∂x∂(−p+τxx)+∂y∂(τyx)+∂z∂(τzx)
When we the body forces (SMx) to the above equation we get
ρDtDu=∂x∂(−p+τxx)+∂y∂(τyx)+∂z∂(τzx)+SMx
Similarly the y-momentum and z-momentum can be written as below.
ρDtDv=∂x∂(τxx)+∂y∂(−p+τyx)+∂z∂(τzx)+SMyρDtDw=∂x∂(τxx)+∂y∂(τyx)+∂z∂(−p+τzx)+SMz